脱炭素を面白く
EnergyShift(エナジーシフト)


画像処理を強化するテスラの思惑、自動運転技術の真髄を探る
テスラの自動運転技術は、その方法と性能の両面において、さまざまなことが伝えられている。十分な安全性はなく、事故を引き起こしていると主張するメディアがある一方で、十分に高い精度を持っているという主張もある。カメラのみで自動運転を進めるテスラの技術とは、どのように開発されているのか、どこに勝算があるのか、ジャーナリストの田中茂氏が報告する。
テキサスで起きた交通死亡事故

4月17日の夜、米国テキサス州ヒューストン北部ハリス郡において、テスラ「モデルS」が住宅地の道路わきにある木に衝突して炎上し、乗っていた男性2人が死亡する事故が発生した。テスラ車による交通死亡事故として多くのメディアで取り上げられたこともあり、同社の株価は19日には714.63ドルとなり、日曜日を挟んだ16日との比較で3.4%下落した。
4月18日付のウォール・ストリート・ジャーナル(WSJ)によると、男性2人は助手席と後部座席から発見され、運転席に人は乗っていなかったという。この状況証拠を元にした記事を読むとほとんどの人が「テスラの自動運転を試したことが事故につながった」と想像するのではないだろうか。しかしこの記事に対し翌19日には、AI会社社長のAhmad A Dalhat氏がTwitterでWSJの記事に対しこうコメントした。
「自動運転が作動しているはずがない。運転席には重量センサーがあり、かつハンドルに手をかけないと動かないはずだ」と。このコメントに対しイーロン・マスク最高経営責任者(CEO)も「事故車両の過去ログを調べたところ、自動運転ソフトウェア「FSD(Full Self-Driving)」を備えていなかったし、そもそも2019年のモデルSならセンターラインがなければ自動運転は起動しない」とコメントを返している。

しかし、これで終わらないのが米国だ。イーロン・マスク氏のコメントを受け22日、消費者の立場から製品を検証するサイト「Customer reports」において、無人で自動運転が可能かどうかを検証した動画が配信された。ただこの検証は、無人でシートベルトをロックした上で椅子とハンドルにおもりをのせたやり方で行われており、恣意性の高い結果となった。このサイトのことを意識しているかは不明だが、26日行われた同社の2021年第1四半期の発表においてイーロン・マスク氏は、「欺瞞に満ちたメディアの慣行がある」と述べた。
テスラにとっては、第1四半期報告の直前に発生した事故により、自動運転で世間にマイナスのイメージを与えてしまったように思える。しかしそれは杞憂だったようだ。イーロン・マスク氏は4月29日、Twitterで、「『FSDベータv9』が2週間ほどでリリースされ、カナダで利用できるだろう」とコメントした。
「FSD」は、テスラが提供する有料オプションの完全自動運転ソフトウェアで、購入価格が1万ドルと決して安くないものの、オートレーンチェンジ、オートパーキング、信号機や一時停止標識コントロール、市街地でのオートステアリングなどの機能があり、将来アップデートにより完全自動運転が実現するとされている。ではこの仕組みはどうなっているのだろうか。
運転予測と実際の運転記録の誤差を修正
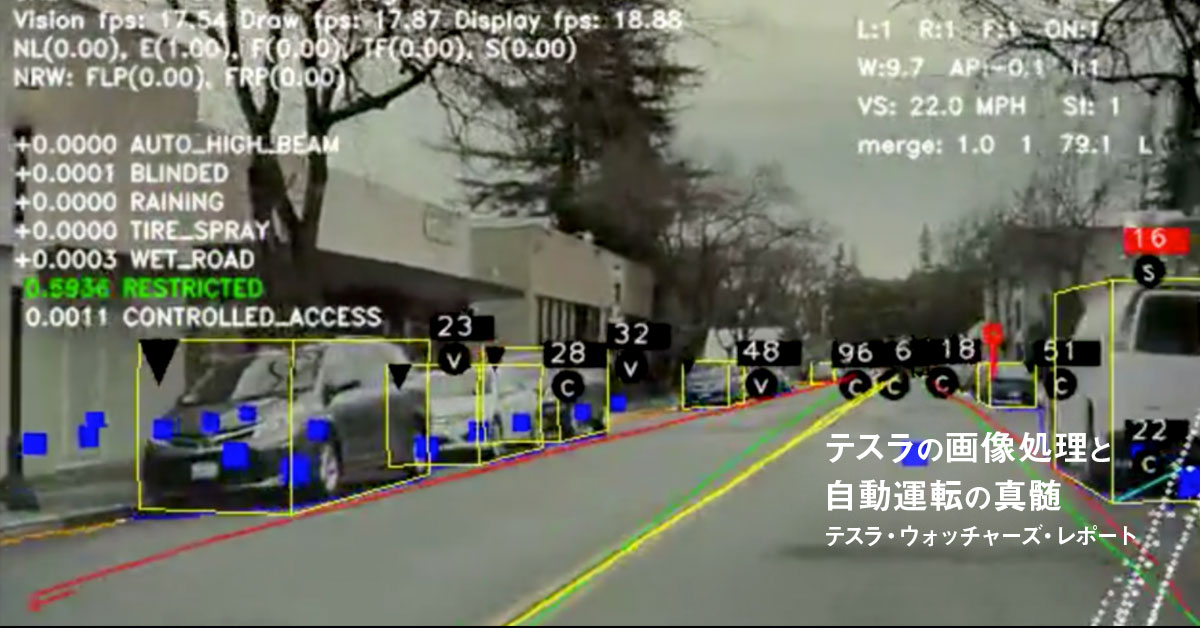
テスラでは、FSDの開発にあたり、1日あたり2,000万マイル、合計数千億マイル蓄積した実車のカメラで捉えた画像を含めた走行データを活用しているという。この手法は、運転予測と実際の運転記録の誤差を埋めるという地道なものだ。例えば運転中、前方に障害物を見つけて運転者が急停車を試みたとする。
この場合ソフトウェアが前方の障害物を確認できていないので、運転者とソフトウェアの「不一致」が記録される。この記録を、FSD担当のエンジニアが解析し、正しい障害物として認識するためのデータへの書き換え作業を行う。同社では、このような作業を繰り返してFSDの精度を高めているのだ。
また、現在テスラでは、ソフトウェアで約200人、ハードウェアで約100人のエンジニアがFSDの業務に携わっており、人力によりFSDの精度を高めると同時に、AI(人工知能)によるディープラーニングも進めているという。
これは、正しい走行データへの置き換え作業をソフトウェアに任せようというものだ。通常ならば、人間が判断しないので、「不正確なラベリング」になる確率が高くなる。しかし、最近の研究成果では、アルゴリズムを工夫することにより、人間と同等のラベリングができるようになってきているという。
テスラだからできる「中央集中型」
ハードウェアの視点でみると、FSDの精度向上に直結するのは、センサーにより認識された情報を正確に早く計算処理する能力だ。そのためには、例えばカメラが捉えた情報を即座に分析して判断を下す強力な制御装置ECU(Electronic Control Unit)が必須となる。
通常の車には、センサーごとにECUが取り付けられており、例えば日産リーフなら30個のECUが搭載される。だが、テスラは統合されたECUが一つしかない。なぜか。このからくりを、「モデル3」に搭載されている統合ECU「HW3.0」を例にとって見ていこう。
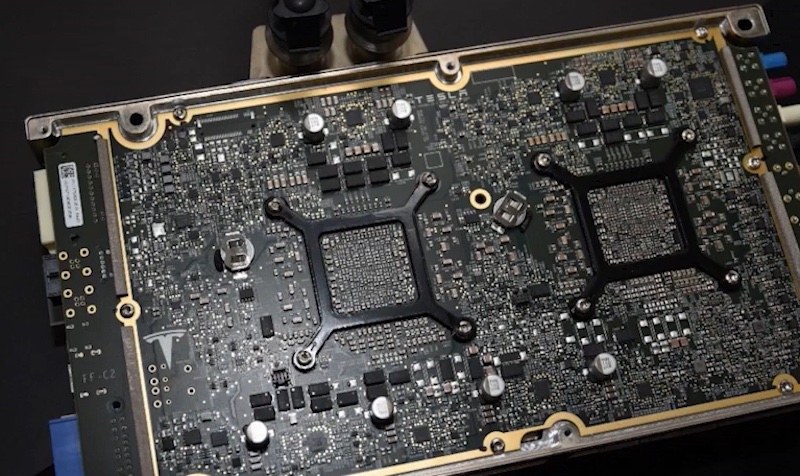
「モデル3」を分解してその構造を明らかにしている日経クロステックによると、「HW3.0」は「自動運転電子制御用ユニット(ECU)」と「メディアコントロールユニット(MCU)」といった2枚の基盤で構成されており、これで全ての運転を制御しているという。そのため発熱量が高く、2枚の基盤の間には水冷機構が備え付けられている。水冷機構はコストが高くつくので、一般的な自動車では採用されないケースが多いという。
「モデル3」の場合、ECUは、直接制御するものとして、8個のカメラと、前方撮影用3眼カメラ、12個のソナー、1個のミリ波レーダー、そしてGPSアンテナがつながっている。一方、MCUは、機能の操作や表示画面の設定、車に搭載された機器同士の通信機能を持っている。他メーカーのEVと異なる点は、カメラに画像処理チップを備えていないことだ。カメラで捉えられた映像は直接「HW3.0」に伝達されて処理される。このおかげで、テスラでは、カメラ搭載の自由度が高まると同時に、複雑な画像処理が可能となっている。
統合ECUが2枚の基盤で済むといった製品設計は、テスラだからこそできるとよくいわれる。伝統的な自動車メーカーは、部品メーカーとの協調を重視するため、各部品メーカーの機能を自動車メーカー(アセンブラー)が制御するのでなく、各部品の情報を受け取って活用する形で製品を生産してきたからだ。
そのためECUの数は必然的に多くなっていく。一方テスラは、サプライチェーンのしがらみがない。それゆえ「中央集中制御」のシステムを構築できたといえる。これにともなうメリットは部品点数減少によるコスト削減効果と、柔軟なシステム構築の変更だとされている。
カメラ認識だけで自動運転
「FSDベータv9」のリリースにあたりイーロン・マスク氏はTwitterで、「センサーは、カメラ単独で行うことになる」と強調している。これが本当なら、テスラは競合他社とは一線を画す独自路線をさらに進めることになるだろう。自動運転に必要なセンサーとしては、カメラに加え、光を用いて対象物までの距離を測定する「LiDAR(light detection and ranging 、光による検知と測距)」や波長の短い電波を用いて対象物との距離や角度の相対速度を測定する「ミリ波レーダー」の双方を活用するのが一般的だからだ。
テスラでは、これまで「LiDAR」は使用せず「ミリ波レーダー」とカメラにより自動運転を進めてきた経緯があるが、カメラのみによる自動運転の勝算はどこにあるのだろうか。この答えの一つが、持続可能なエネルギーとEVに特化したサイトCleanTechnicaで2020年8月3日に掲載された記事「Tesla Achieved The Accuracy Of Lidar With Its Advanced Computer Vision Tech(テスラ、高度なコンピュータービジョン技術でLiDAR並みの正確性を達成)」にあった。
同記事によると、カメラの入力データと通信機能との融合が非常に難しいが、その課題をテスラは克服したとしている。過去に遡ると、イーロン・マスク氏は、2019年4月29日に開かれた「Tesla Autonomy Day」においても、自動運転はカメラに依存したほうが、省電力でコスト的にも安いと述べている。その意味で捉えると、同氏にとって今回のカメラ単独路線は、理にかなった選択なのだろう。AIを活用したソフトウェアの進化とハードウェアの構造的優位性を最大限に活用し、テスラのFSDは予想以上の進化を遂げていくかもしれない。
モビリティの最新記事